AI coordinator管理人の清水秀樹です。
今回はZED Cameraによる3D-SLAMの作成方法を簡単に紹介します。
基本的にマニュアルに沿ってセットアップしていけば簡単に作成できますが、ZEDカメラを使うまでの環境のセットアップでハマりポイントが多数あり、自分への備忘録的な意味も含めてここに記録します。
3D-SLAM作成に興味がある方は是非チャレンジしてみてください。
ハードウェア構成
- ZED Camera
- DELL G7(GTX1060内蔵)
ソフトウェア構成
- Ubuntu16.04
- ZED SDK 2.5.1
- CUDA 9.2
Ubuntuインストール準備
DELL G7にUbuntuをインストールしたのですが、これがまたUbuntuのバージョンや英語版または日本語版でそれぞれインストール後のUbuntuの挙動が異なって大変でした。
このPCにインストールするバージョンは、
「Ubuntu16.04 英語版」
が正解です。
これ以外のUbuntuをインストールすると、
- wifiが使えない
- シャットダウンができない
- 輝度調整ができない
- よくフリーズする
等の事象に悩まされます。
そのためDELL G7へインストールする場合はUbuntuのバージョンに注意しましょう。
Ubuntuをインストールにするにあたり、便利なソフトを紹介します。
Ubuntuを再インストールする際に役に立つ、
「AOMEI Partition Assistant Standard Edition 7.0」
と、Ubuntuをインストールするときに作成する必要がある起動USBを簡単に作ることができる
「unetbootin-windows」
です。
前者の「AOMEI Partition Assistant Standard Edition 7.0」は初回Ubuntuインストール時には必要ありませんが、Ubuntuを再インストールする際やUbuntuをインストールしたパーティションを削除する際に非常に重宝します。
使い方は他のサイトに任せますが、筆者のように安定したUbuntuのバージョンを探すために何度もUbuntuをインストールしなおすケースがある場合は、活用してみると良いかと思います。
Ubuntuインストール後の初期設定
シャットダウンが遅いのを解消する
私の端末はUbuntuインストール時はシャットダウンが遅かったため、こちらのサイトを参考にconfigファイルを修正しました。
簡単にできるのでオススメです。
DELL G7にインストールすした場合は、シャットダウンが遅いという問題以外は特に大丈夫かと思います。
GPUを認識させる
これが一番はまりました。
Nvidiaのドライバーをインストールしても、まったくGPUが認識しませんでした。
原因はセキュアブートが有効になっているからでした。
これに悩まされ、結果的に3週間ぐらい途方に暮れていました。
解決策がこちらのサイトに紹介されています。
同じ悩みをもつ方は参考にしてみてください。
ZED SDKのインストール
基本的には公式サイトに則ってセットアップすればCUDAまで無事インストールできるかと思います。
動作確認
ZED SDKをインストールしたら、状態をチェックできるアプリがあるので確認してみましょう。
以下画像の「ZED Diagnostic」を起動します。

起動すると、以下のような画像が表示されるので、

Startを押下してチェックを開始します。
チェックして以下のようにエラーがなければ問題なくZED Cameraが使用できる状態になっています。

ここまでできたら、早速「ZED Depth Viewer」を使ってみましょう。
すごい!!
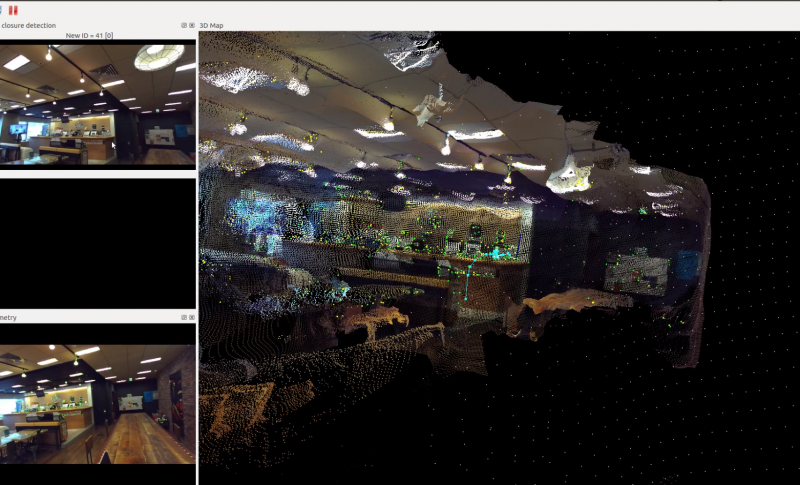
3D-SLAMの作成
初めにRTAB-MAPのインストールが必要です。
まずはこちらのサイト参考にRTAB-MAPをインストールしてください。
RTAB-MAPのインストールが完了したら次はこちらのサイトに紹介されているやり方で3Dマップが簡単に作成できるかと思います。
無事動きましたでしょうか?
作成した3D-SLAM画像をウニョウニョ動かしてみると楽しいですよ。
割と簡単にできたかと思います。
Rviz上でも動かすことができます。
これからこのカメラを使って色々試してみたいと思います。
それではまた。

LEAVE A REPLY