0Jetson NanoでYOLOをPython起動!Dockerでライブ表示 → TensorRT化 → 検出結果を別Pythonへ渡す(ROS前段)エッジAIJetson NanoでYOLOをPython起動し、Dockerでリアルタイム表示→TensorRT化→検出結果をUDPで別Pythonへ渡すまでを1コマンドずつ解説。ROS連携の前段にちょうどいい構成です。2026年2月4日Hideki434 viewsRead More
0客先常駐SIerからAIエンジニアへ:Microsoft CEOとの面会と情報発信のすすめAIキャリア・組織論客先常駐の社畜SIerから独学でAIエンジニアになり、Microsoft CEOサティア・ナデラ氏と面会するまでに至った筆者の体験談。情報発信を続けることで人生が変わるリアルな価値を語ります。2023年2月3日Hideki1364 viewsRead More
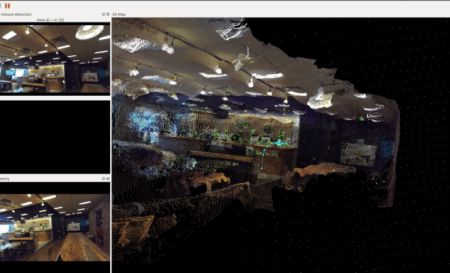
0ZED Camera + ROS で簡単3D-SLAM入門技術記事一覧(全件)ZED CameraとROSを組み合わせた3D-SLAMの作成方法を解説。Ubuntu初期設定からZED SDKインストール、CUDA・cuDNN導入、動作確認まで、ハマりポイントを潰しながら備忘録的にまとめます。2018年9月16日Hideki372 viewsRead More
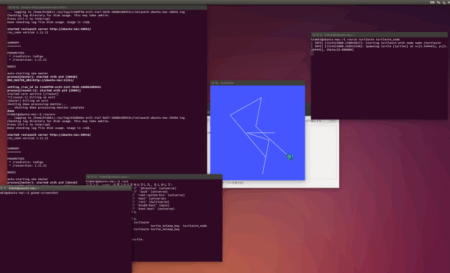
1ラズパイで作るROS搭載ロボット:Joystickで遠隔操作してみようエッジAIROSを搭載したラズパイタンクをJoystickで遠隔操作する方法。IPアドレスの確認、Joystick入力値の調べ方、サンプルソースコードまで備忘録的にまとめた、ROSロボットの基本操作レシピです。2018年5月3日Hideki592 viewsRead More
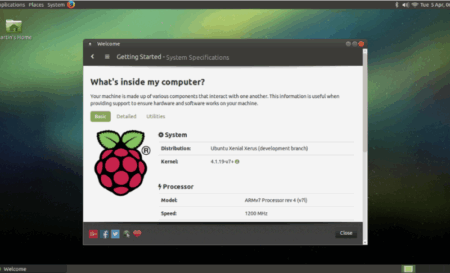
3ラズパイで作るROS搭載ロボット:Ubuntu mate + ROS Kineticのセットアップ手順エッジAIラズパイにUbuntu mate+ROS Kineticをセットアップする手順を、ハマりどころを潰しながら解説。SSH・日本語入力・MacからのVNC接続まで一通り構築する備忘録的まとめです。2018年3月24日Hideki652 viewsRead More
0ROS環境の準備:iMac2012にubuntu14.04をネイティヴ環境にインストールする方法技術記事一覧(全件)iMac 2012にUbuntu 14.04をネイティブ環境としてインストールしてROS開発環境を整える手順を解説。意外と簡単に進められたインストールの実体験と、ROS導入と動作確認まで紹介します。2017年12月29日Hideki252 viewsRead More