March 14th,2018
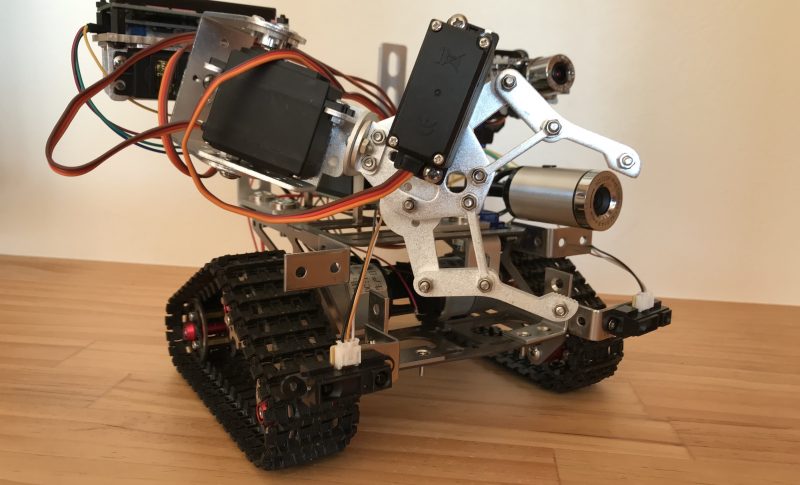
動画では、無限軌道(クローラ)駆動の機体が段差や床面の凹凸を越えて旋回し、現場を移動する様子が見えます。カメラはチルト構造で、人の目線より少し低い位置から「中の状況をまず可視化する」用途に振った設計です。被災現場の初動で必要になる、最初の偵察用途を想定したプロトタイプです。
この機体を組んだのは2018年。当時は手動操縦+カメラ映像を別端末で確認する構成でした。2026年の今、同じフレームの上に載せられるものは大きく変わっています。Jetson Nano に YOLO12 を載せれば「人を検出したら自動停止して通報」が動きます。Raspberry Pi に SLAM を足せば、進入経路を地図化して戻るルートも残せます。
8年前に手で組んだフレームの上に、その時点で最新のAIをそのまま乗せられる。現場で動くものを先に作っておくと、AIの進化に追いつくときの土台になる——これが私のAI/IoT技術顧問サービスの根っこにある考え方です。先端技術だけ追いかけても、現場で動かなければ意味がない。動くハードウェアと現場理解さえ持っておけば、新しいAIモデルが出るたびに事業が前に進みます。


LEAVE A REPLY