ROSを使えば遠隔操作が簡単
最近はWRSに向けたガチ開発で、記事更新をサボっているAI coordinator管理人の清水秀樹です。
本日はJoystickを使って、ROSを搭載したラズパイタンクを遠隔操作してみたいと思います。
というか備忘録です。(年取ってきたせいか、すぐコマンドを忘れるため。)
サンプルソースコードも記事最下部に紹介していますので、参考にして頂ければと思います。
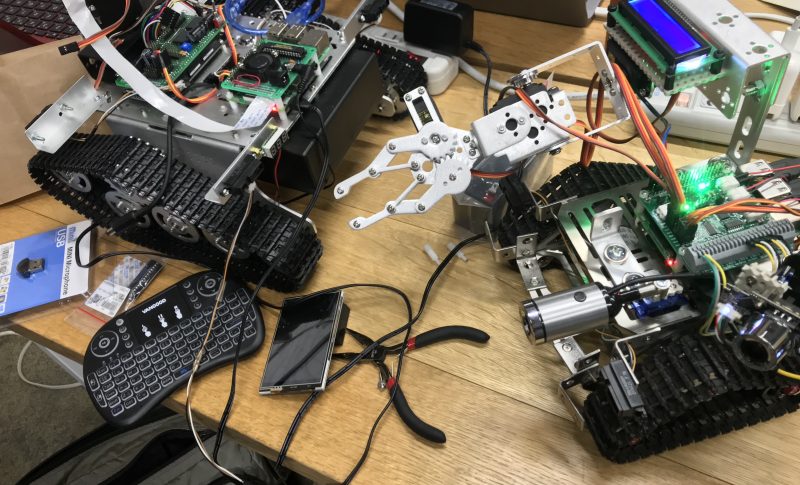
準備するもの
- ROS搭載ラズパイタンク(別にタンクである必要性はない。動かせるロボットであればなんでも良い)
- ROS搭載PC
- Joystick
ROS搭載PCにJoystickを接続して、遠隔操作でROS搭載ラズパイタンクを動かす感じです。
ラズパイにROSを搭載するやり方は以下の記事を参考にしてください。
ラズパイで作るROS搭載ロボット:Ubuntu mate + ROS Kineticのセットアップ手順
ラズパイタンクを手軽に作りたいなら以下の記事を参考にしてみてください。
ADRPTB8C制御基盤を使った本格的なロボット開発 for ラズパイ
PCにubuntu+ROSをインストールしたい方は以下の記事を参考にしてください。
ROS環境の準備:iMac2012にubuntu14.04をネイティヴ環境にインストールする方法
遠隔操作方法
実はこれ、ROSを使うことですごい簡単に遠隔操作が実装できます。
コマンドライン数行で遠隔操作ができるようになります。
まずはラズパイタンク(ロボット側のROS)側で以下のコマンドを入力します。
$ roscore続いて別のターミナルを起動して、ラズパイタンク側のIPアドレスと起動するプログラムを以下の通り入力します。
$ export ROS_IP=192.168.xx.xx
$ rosrun ros_start xxxx.py以上でラズパイタンク(ロボット)側の準備は完了です。
続いてJoystickを接続した遠隔操作するPC側の設定です。
以下の通りコマンドを入力します。
$ export ROS_MASTER_URI=http://192.168.xx.xx:11311
$ export ROS_IP=192.168.xx.xx
$ rosrun joy joy_node1行目に指定するIPアドレスはラズパイタンク側を指定します。
2行目のIPアドレスは自分のIPアドレスを指定します。
この場合はPC側のIPアドレスですね。
3行目はjoy_nodeの指定です。
この際、エラーが表示される場合は、joy_nodeのドライバーがインストールされていないことが原因ですので、以下のコマンドでインストールしましょう。
$ sudo apt-get install ros-indigo-joystick-driversindigo部分は必要に応じてROSバージョン名に変更してください。
全てが成功すればjoystickでROS搭載ラズパイロボットが動くはずです。
参考情報
IPアドレスの調べ方
IPアドレスを調べる方法についてです。
以下のコマンドを入力することで、自分のIPアドレスを知ることができます。
$ ifconfig
Joystickの入力値の調べ方
プログラムを作成する上で、Joystickの入力値を詳細に知る必要があります。
どのボタンを押したらどんな値が返ってくるのか。
以下のコマンドを入力すればJoystickの入力値を確認することができます。
$ roscore
$ rosrun joy joy_node
$ rostopic echo /joy
上記3つのコマンドはそれぞれ別のターミナルから入力してください。
成功すると以下のような値がターミナルに表示され、Joystickのボタンを入力するたびに値の変化を確認することができます。
header:
seq: 632
stamp:
secs: 1525353295
nsecs: 402288286
frame_id: ''
axes: [-0.0, -0.0, 0.0, -0.0, -0.0, 0.0, 0.0, 0.0]
buttons: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
---
Joystickのどのボタンをどう入力するとどんな値が設定されているのか分かるようになりますので、これらの値の変化を把握した上でプログラムソースを作成しましょう。
サンプルソースコード
Joystickで動かすことができるサンプルソースコードです。
ロボットアーム用とキャタピラ駆動用と紹介します。
適当に使ってみてください。
ただし、使用上の注意点があります。
このソースを使用することによるハードの故障等は、一切責任を負いかねますので、それを了承の上で使用してください。
なぜなら、私はサーボモーターを壊しました。
ソースを間違えることで、簡単にハードが壊れることがあるので十分気をつけてください。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from sensor_msgs.msg import Joy
from geometry_msgs.msg import Twist
import Adafruit_PCA9685
from Adafruit_MotorHAT import Adafruit_MotorHAT
pwm = Adafruit_PCA9685.PCA9685(address=0x60)
pwm.set_pwm_freq(60)
def joy_sarbo(joy_msg):
#print float(joy_msg.axes[3])
#print float(joy_msg.axes[4])
#print int(joy_msg.axes[3])
#print int(joy_msg.axes[4])
#0〜180度で90が真ん中
#print joy_msg.buttons[2]
a = 90*joy_msg.buttons[2]/1.3
pos2 = 90 +int(a)
#print pos0
pulse_2 = (650-150)*pos2/180+150+(-10)
#print pulse_5
pwm.set_pwm(2, 0, pulse_2)
b = 90*joy_msg.axes[1]
pos3 = 130 + (int(b))
print pos3
if pos3 >= 130:
pulse_3 = (650-150)*pos3/180+150+(-10)
#print pulse_5
pwm.set_pwm(3, 0, pulse_3)
#肩 初期値を50度にしている。
c = -90*joy_msg.axes[0]
pos4 = 50 + (int(c))
print pos4
pulse_4 = (650-150)*pos4/180+150+(-10)
#print pulse_5
pwm.set_pwm(4, 0, pulse_4)
a = 90*joy_msg.axes[3]
pos5 = 90 + (int(a))
print pos5
pulse_5 = (650-150)*pos5/180+150+(-10)
#print pulse_5
pwm.set_pwm(5, 0, pulse_5)
b = 90*joy_msg.axes[4]
pos6 = 90 + (int(b))
print pos6
pulse_6 = (650-150)*pos6/180+150+(-10)
#print pulse_5
pwm.set_pwm(6, 0, pulse_6)
c = 90*joy_msg.axes[3]
pos7 = 90 + (int(c)/2)
print pos7
pulse_7 = (650-150)*pos7/180+150+(-10)
#print pulse_5
pwm.set_pwm(7, 0, pulse_7)
rospy.init_node('sarbo_joy_twist')
sub = rospy.Subscriber('joy', Joy, joy_sarbo, queue_size=1)
rospy.spin()
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from sensor_msgs.msg import Joy
from geometry_msgs.msg import Twist
import Adafruit_PCA9685
from Adafruit_MotorHAT import Adafruit_MotorHAT
mh = Adafruit_MotorHAT(addr=0x60)
myMotor1 = mh.getMotor(1)
myMotor2 = mh.getMotor(2)
def joy_callback(joy_msg):
#print joy_msg.buttons[0]
#print float(joy_msg.axes[0])
print joy_msg.axes[6]
print joy_msg.axes[7]
if joy_msg.buttons[0] == 1:
v = 255
else:
v=180
if joy_msg.axes[6] == 0 and joy_msg.axes[7] >0:
myMotor1.run(Adafruit_MotorHAT.FORWARD)
myMotor2.run(Adafruit_MotorHAT.FORWARD)
a = v
b = v
elif joy_msg.axes[6] > 0 and joy_msg.axes[7] == 0:
myMotor1.run(Adafruit_MotorHAT.BACKWARD)
myMotor2.run(Adafruit_MotorHAT.FORWARD)
a = v
b = v
elif joy_msg.axes[6] < 0 and joy_msg.axes[7] == 0:
myMotor1.run(Adafruit_MotorHAT.FORWARD)
myMotor2.run(Adafruit_MotorHAT.BACKWARD)
a = v
b = v
elif joy_msg.axes[6] == 0 and joy_msg.axes[7] < 0:
myMotor1.run(Adafruit_MotorHAT.BACKWARD)
myMotor2.run(Adafruit_MotorHAT.BACKWARD)
a = v
b = v
elif joy_msg.axes[6] < 0 and joy_msg.axes[7] > 0:
myMotor1.run(Adafruit_MotorHAT.FORWARD)
myMotor2.run(Adafruit_MotorHAT.RELEASE)
a = v
b = 0
elif joy_msg.axes[6] > 0 and joy_msg.axes[7] > 0:
myMotor1.run(Adafruit_MotorHAT.RELEASE)
myMotor2.run(Adafruit_MotorHAT.FORWARD)
a = 0
b = v
elif joy_msg.axes[6] < 0 and joy_msg.axes[7] < 0:
myMotor1.run(Adafruit_MotorHAT.BACKWARD)
myMotor2.run(Adafruit_MotorHAT.RELEASE)
a = v
b = 0
elif joy_msg.axes[6] > 0 and joy_msg.axes[7] < 0:
myMotor1.run(Adafruit_MotorHAT.RELEASE)
myMotor2.run(Adafruit_MotorHAT.BACKWARD)
a = 0
b = v
else:
myMotor1.run(Adafruit_MotorHAT.RELEASE)
myMotor2.run(Adafruit_MotorHAT.RELEASE)
a = 0
b = 0
myMotor1.setSpeed(abs(int(a)))
myMotor2.setSpeed(abs(int(b)))
rospy.init_node('joy_twist')
sub = rospy.Subscriber('joy', Joy, joy_callback, queue_size=1)
rospy.spin()
以上です。
それではまた。

お世話になっております。
ジョイスティックを用いて、ROSで駆動する遠隔操作用のロボットを制作するため、本ページの記事を拝読させていただきました。
私の方でラズベリーパイ側でrosrunを実行すると、Couldn’t find executable namedが表示されてしまうため、何らかの設定に誤りがあるものと考えております。
そこで、差し支えなければ、cmakelist.txt package.xml bashファイルの設定をご教示位いただけないでしょうか。
よろしくお願いいたします。