この記事でのファイル名ルール(混乱防止)
この記事では モデル名を最後まで best.pt で統一します。
- PCで学習してできたファイル:
best.pt - Jetsonへコピーした先:
~/yolo_docker/models/best.pt - JetsonでTensorRT化してできるファイル:
best.engine - リネーム後:
best_640_fp16.engine
「名前を付け替えたい」場合は、最後にまとめてやるのがおすすめです。まずは
best.pt固定で進めると迷いません。
手順1:PCで作った best.pt をJetsonへコピー
Jetson(ホスト側)でフォルダを作る:
mkdir -p ~/yolo_docker/modelsWinSCPなどで、PCの runs/detect/xxx/weights/best.pt をjetson側の以下にコピー:
~/yolo_docker/models/best.pt
手順2:JetsonでDocker起動
Jetson(ホスト側):
DISPLAY=:0 xhost +SI:localuser:rootDocker起動(例):
sudo docker run --rm -it --name yolo12_gui \
--runtime nvidia --net=host --privileged --device=/dev/video0 \
-e DISPLAY=:0 \
-v /tmp/.X11-unix:/tmp/.X11-unix:rw \
-v $HOME/yolo_docker:/workspace -w /workspace \
yolo12-gui-jp4 bash手順3:Docker内で best.pt が見えるか確認
ここ、あなたの指摘どおり ls -lh だとサイズ情報が目立って「ファイル名が見えにくい」ので、初心者向けには次の形が分かりやすいです。
✅ ファイル名が見えやすい確認コマンド
ls -la /workspace/models「一覧でファイル名が必ず見える」ので迷いません。
さらに「サイズも見たい」なら:
ls -lah /workspace/modelsbest.pt が表示されていればOKです。
手順4:JetsonでTensorRT化(engine作成)
TensorRT化(エンジン作成)はこれです:
yolo export model=/workspace/models/best.pt format=engine imgsz=640 half=True device=0ここでのポイント
format=engine:TensorRTのエンジン(.engine)を作るimgsz=640:エンジンが想定する入力サイズ(推論時も基本これに合わせる)half=True:FP16(半精度)で最適化する設定(速度が出やすい)
手順5:できた .engine を分かりやすい名前に変更(任意だけどおすすめ)
5-1) まず生成物を確認
ls -la /workspace/modelsここに best.engine(もしくは近い名前)ができていればOKです。
5-2) リネーム(fp16の意味を先に説明)
ここで出てくる fp16 は、さっきの half=True の意味です。
- FP32:通常の精度(重め)
- FP16:半分の精度で計算(軽い・速いことが多い)
→ Jetsonでは 速度優先でFP16を使うのが定番です
だから、リネームで fp16 と書いておくと、
「このengineはFP16で作ったやつだ」と後で見返したときに分かります。
例:best.engine を best_640_fp16.engine に変更
mv -f /workspace/models/best.engine /workspace/models/best_640_fp16.engineもし
best.engineという名前じゃなかったら、ls -laの結果に出ている「実際の.engine名」を使ってください。
手順6:engineで推論して確認(表示は同じ)
例:yolo_live.py を使う場合(指定記事と同じ考え方で「MODELだけ差し替え」):
MODEL=/workspace/models/best_640_fp16.engine IMGSZ=640 python3 yolo_live.py推論で見るポイント(最低限)
- 速くなったか(FPS/体感)
- 検出がおかしくなってないか
- IMGSZがengine作成時と同じか(ここ超大事)
まとめ(修正版)
fp16 は half=True のこと(FP16最適化で速くなりやすいので、名前に入れると管理が楽)
ファイル名は 最後まで best.pt で統一(混乱しない)
ファイル確認は ls -la(ファイル名が見やすい)
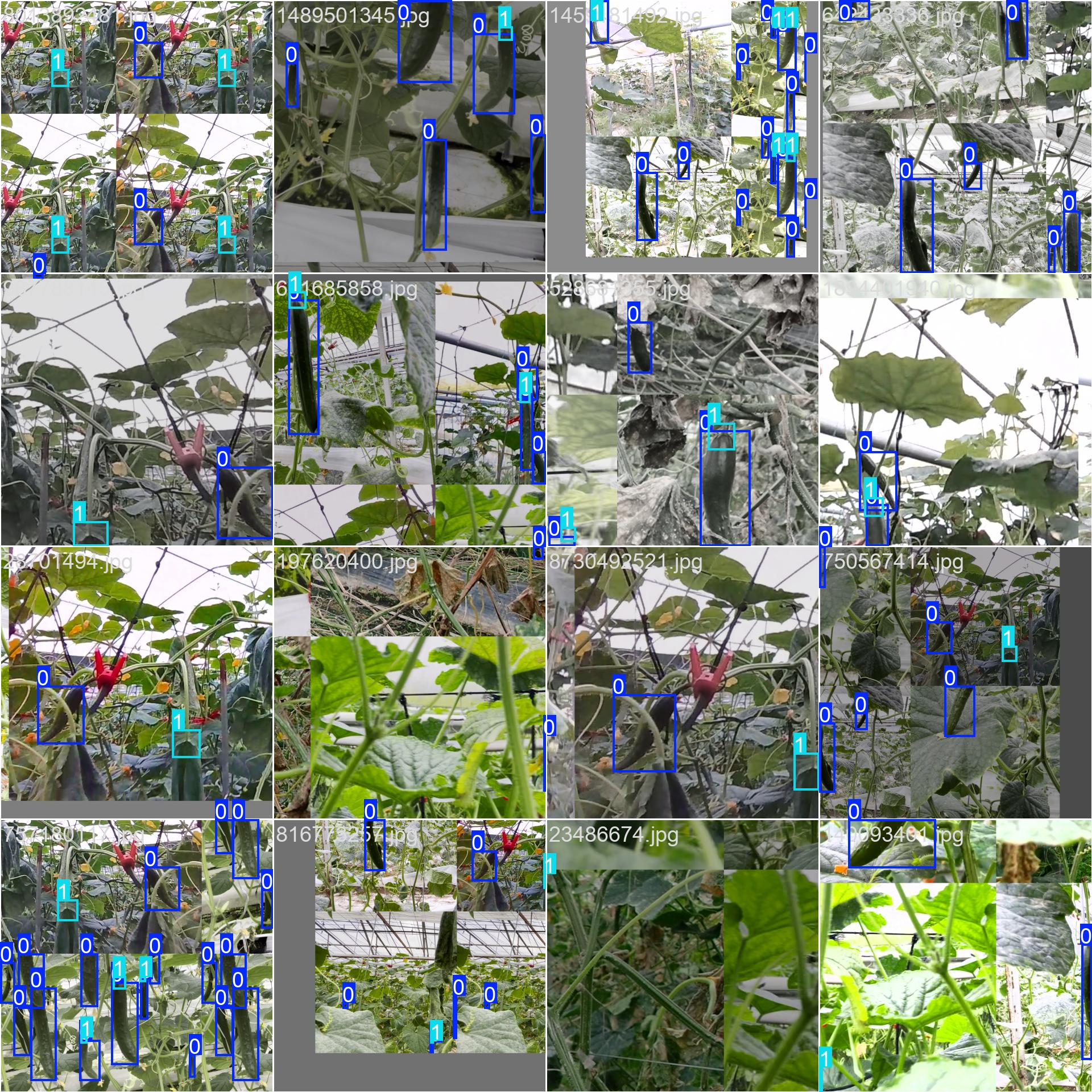
ここまで出来てれば自前のデータでモデルを作ってjetsonでTensorRT化して使える手順を確立できます。
ぜひ試してみてください。

LEAVE A REPLY