Let’s play with AI.
こんにちは。
AI coordinator管理人の清水秀樹です。
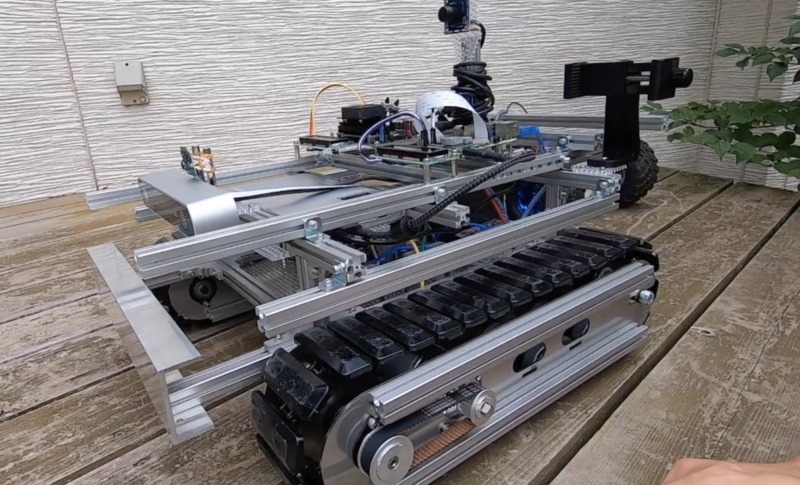
今回は外でも動く遠隔操作AIロボットを作ろうpart01:土台作成編に続き、part2:arduino編です。
part01を見ていない方はこちらの動画でご確認頂けます。
今回ご紹介するarudino編も動画にしていますので、参考にしてみてください。
arduinoでタイヤを動かしてみよう。
arduino IDEのセットアップ方法は以下のページで紹介しています。
ArduinoでDCモーター/サーボモーターを動かしてみよう!
arduino IDEのセットアップが完了したら早速下記ソースコードを書き込みましょう。
/*
* This example shows how to control MDDS30 in Serial Simplified mode with Arduino.
* Set MDDS30 input mode to 0b11001100
* Open Serial Monitor, set baudrate to 9600bps and "No line ending".
* Send 0: Left motor stops
* 1: Left motor rotates CW with half speed
* 2: Left motor rotates CW with full speed
* 3: Left motor rotates CCW with half speed
* 4: Left motor rotates CCW with full speed
* 5: Right motor stops
* 6: Right motor rotates CW with half speed
* 7: Right motor rotates CW with full speed
* 8: Right motor rotates CCW with half speed
* 9: Right motor rotates CCW with full speed
*
* Note: This example also compatible with MDDS10 and MDDS60
*
* Hardware Connection:
* Arduino Uno MDDS30
* GND ---------- GND
* 4 ------------ IN1
*
* Related Products:
* - SmartDriveDuo-30: http://www.cytron.com.my/P-MDDS60
* - CT UNO: http://www.cytron.com.my/p-ct-uno
* - DC Brush Motors: http://www.cytron.com.my/c-84-dc-motor
* - LiPo Battery: http://www.cytron.com.my/c-87-power/c-97-lipo-rechargeable-battery-and-charger
* - Male to Male Jumper: https://www.cytron.com.my/p-wr-jw-mm65
*
* URL: http://www.cytron.com.my
*/
#include <SoftwareSerial.h>
#include <Cytron_SmartDriveDuo.h>
#define IN1 4 // Arduino pin 4 is connected to MDDS60 pin IN1.
#define BAUDRATE 9600
Cytron_SmartDriveDuo smartDriveDuo30(SERIAL_SIMPLFIED, IN1, BAUDRATE);
char inChar;
signed int speedLeft, speedRight;
void setup()
{
pinMode(13, OUTPUT);
Serial.begin(9600);
digitalWrite(13, HIGH);
delay(2000); // Delay for 5 seconds.
digitalWrite(13, LOW);
}
void loop()
{
if (Serial.available()) {
//delay(100);
inChar = (char)Serial.read();
//int inChar = (char)Serial.parseInt();
/*String rcvd = Serial.readStringUntil('\n');
float inChar = rcvd.toFloat();
Serial.println(inChar);
digitalWrite(13, LOW);
speedLeft = inChar * 100;
*/
if (inChar == '0') {
digitalWrite(13, LOW);
speedLeft = 0;
}
else if (inChar == '1') {
digitalWrite(13, HIGH);
speedLeft = 50;
}
else if (inChar == '2') {
digitalWrite(13, HIGH);
speedLeft = 100;
}
else if (inChar == '3') {
digitalWrite(13, HIGH);
speedLeft = -50;
}
else if (inChar == '4') {
digitalWrite(13, HIGH);
speedLeft = -100;
}
else if (inChar == '5') {
digitalWrite(13, LOW);
speedRight = 0;
}
else if (inChar == '6') {
digitalWrite(13, HIGH);
speedRight = 50;
}
else if (inChar == '7') {
digitalWrite(13, HIGH);
speedRight = 100;
}
else if (inChar == '8') {
digitalWrite(13, HIGH);
speedRight = -50;
}
else if (inChar == '9') {
digitalWrite(13, HIGH);
speedRight = -100;
}
smartDriveDuo30.control(speedLeft, speedRight);
}
}GitHubリポジトリにもあります。
arduino IDEのシリアルモニタから数字を打ち込めばタイヤが回転します。
詳細は動画を参照ください。
次回はラズパイからタイヤを動かす内容をご紹介致します。
それではまた!

LEAVE A REPLY