0Raspberry Piで始める独自ロボット開発:簡単OS初期設定エッジAIRaspberry Piで独自ロボット開発を始めるためのOS初期設定をまとめた解説。ユーザー/ルートパスワード設定、ネットワーク・時間・日本語入力、カメラとSSH有効化、Mac側からのSSH接続まで網羅。2017年12月21日Hideki290 viewsRead More
0Raspberry Piで始める独自ロボット開発:パーツ準備編エッジAIAI coordinator独自のキャタピラ付きカメラロボット製作シリーズの第1弾。秋葉原での買い出し、SDカード準備、ラズパイのOSインストール、ケース取り付けまでの初期セットアップを解説。2017年12月20日Hideki339 viewsRead More
0Realtime Multi-Person 2D Pose Estimationを試してみた!技術記事一覧(全件)Realtime Multi-Person 2D Pose Estimation(OpenPose)を実際に試したレポート。画像や動画から複数人の姿勢を推論できるオープンソースを動かす環境構築・ソースコード紹介付き。2017年12月18日Hideki275 viewsRead More
0すぐ試せる画風変換アルゴリズム chainer-goghが凄すぎる件について技術記事一覧(全件)画風変換アルゴリズム chainer-gogh をローカル環境で試す手順を紹介。お気に入りの写真をゴッホやピカソ風に変換できる仕組みと、参考サイト・ソースコード・実行結果を解説します。2017年12月16日Hideki260 viewsRead More
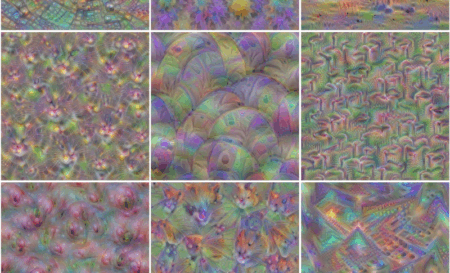
0すぐできるDeepDreaming with TensorFlow で画像生成にチャレンジ技術記事一覧(全件)TensorFlowのDeepDream tutorialを動かして自分の画像から幻想的な画像生成にチャレンジする手順。GitHubソースとinception5hのダウンロードから.ipynb実行までの流れを紹介。2017年12月13日Hideki245 viewsRead More
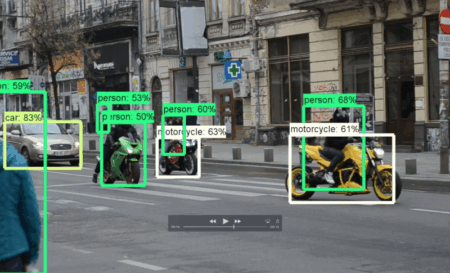
0Tensorflow object detectionをリアルタイム映像で使う方法技術記事一覧(全件)TensorFlow Object Detection APIを使い、静止画ではなくリアルタイム動画で物体検出する方法を解説。Pythonサンプルコードと、表示フォントサイズを大きくするカスタマイズも紹介。2017年12月3日Hideki293 viewsRead More
7MNISTやCIFAR-10でモデル評価時に間違った画像を確認する方法技術記事一覧(全件)MNISTやCIFAR-10で画像分類モデルを学習した際、推論を間違えた画像だけを抽出して目視確認する方法を解説。実装サンプルコードと結果の見方を、両データセットの実例で紹介します。2017年12月1日Hideki817 viewsRead More
0Node-RED + Cloudantを使って簡単にアプリ間連携する方法クラウド・IoTNode-REDとCloudant(IBM Cloud)を組み合わせて、サーバー実装なしで2つのアプリ間でデータをやり取りする方法を解説。Internet of Things Platform StarterからのDB連携実装例。2017年11月29日Hideki225 viewsRead More
0PROTECT KIDSってどんなロボット?技術記事一覧(全件)AI coordinator独自開発の見守りロボット「PROTECT KIDS」のコンセプト・ハードウェア仕様・ソフトウェア仕様を公開。開発前提や、長期開発に必要な仕様変更の柔軟性も含めて解説します。2017年11月17日Hideki190 viewsRead More
8PROTECT KIDS開発始動 2058年販売開始 求む開発協力者!技術記事一覧(全件)AI coordinatorが2058年リリース予定の見守りロボット「PROTECT KIDS」開発始動を宣言する記事。FINDING KIDSアプリを皮切りに、教育・宿題サポートまでできるロボットを目指す構想と協力者募集。2017年11月15日Hideki875 viewsRead More